C’est parti pour une 2e année du projet pilote Robot 360. Voici une brève description du projet :
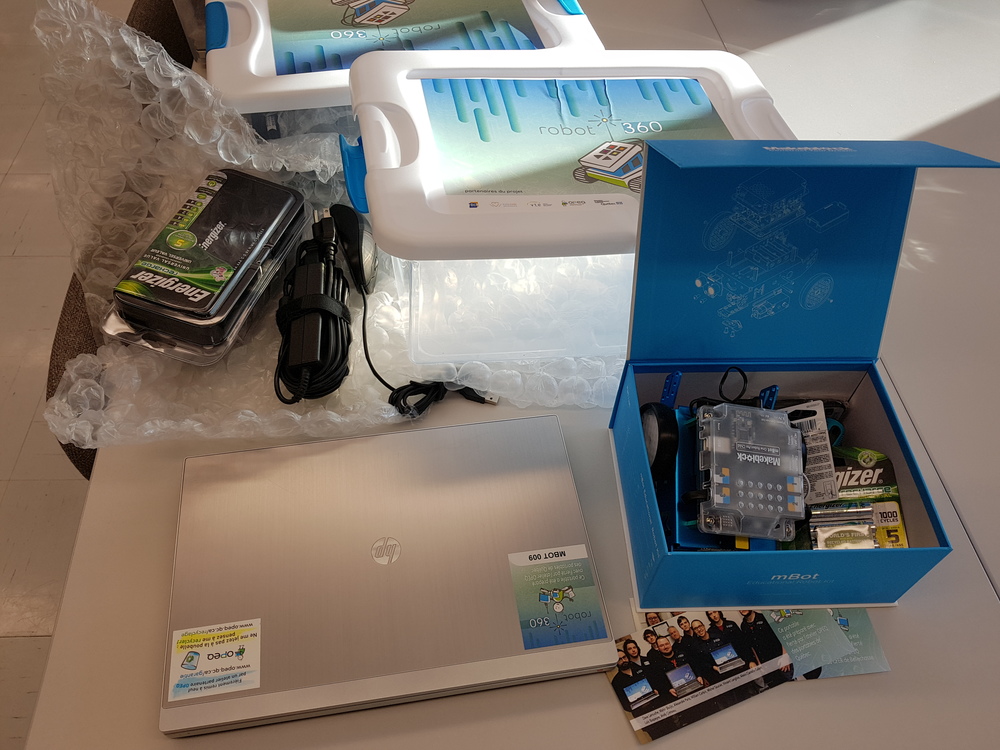
Robot 360 est un projet pilote et un tour d’horizon des possibilités de la robotique pédagogique. Les conseillers pédagogiques qui ont participé à la phase 1 du projet sont invités à deux journées de formation et de partage d’expertise. Pour cette deuxième phase, chaque commission scolaire participante (CS) recevra un ensemble de 10 trousses de robotique (une par CS, sans égard au nombre de conseillers pédagogiques participants).
Rencontre de deux journées où vous êtes invités à convier un ou deux enseignants qui participent déjà à Robot 360, pour aller plus loin tous ensemble; En compagnie du service national du RÉCIT.
Synthèse et recommandations
Technique
À propos du mBot et Ranger
Connexion Bluetooth avec portable : Attention aux piles. En faiblissant, la connexion avec le portable peut se perdre et, contrairement aux tablettes, le robot ne se reconnecte pas automatiquement (on doit retourner dans le menu connecter).
Mbot Bluetooth et Ranger: l’outil le plus stable (connexion) et le plus simple est la tablette. Sinon connexion USB et téléversement du programme pour profiter de la puissance du logiciel installé sur l’ordinateur.
Mbot wifi est très stable au niveau de la connexion, mais on a besoin d’un portable.
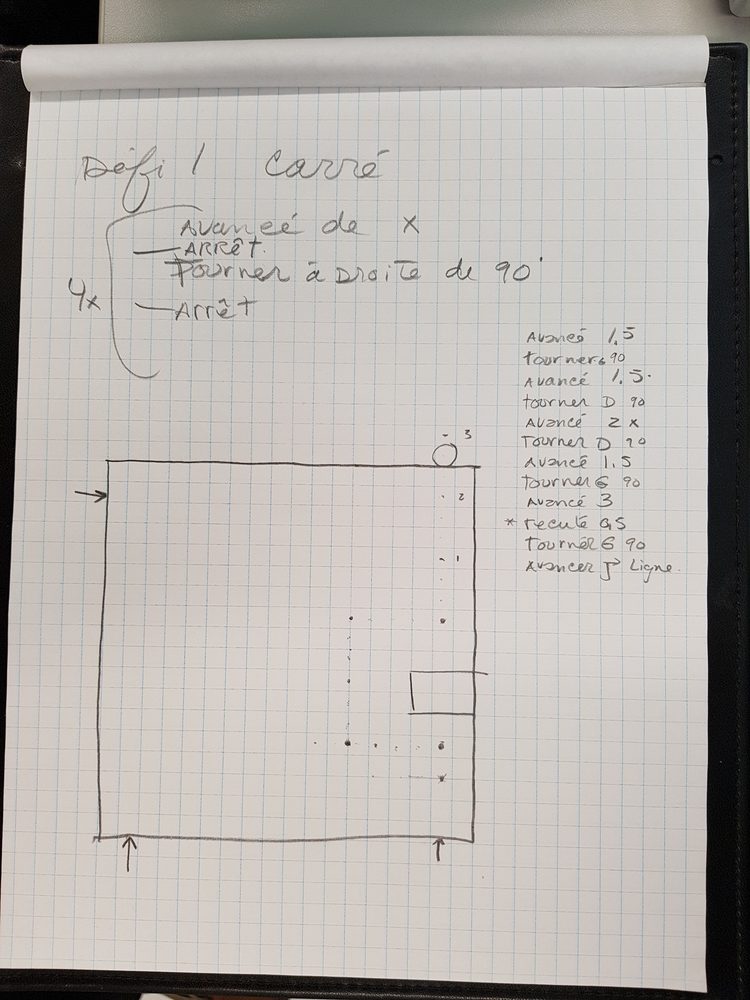
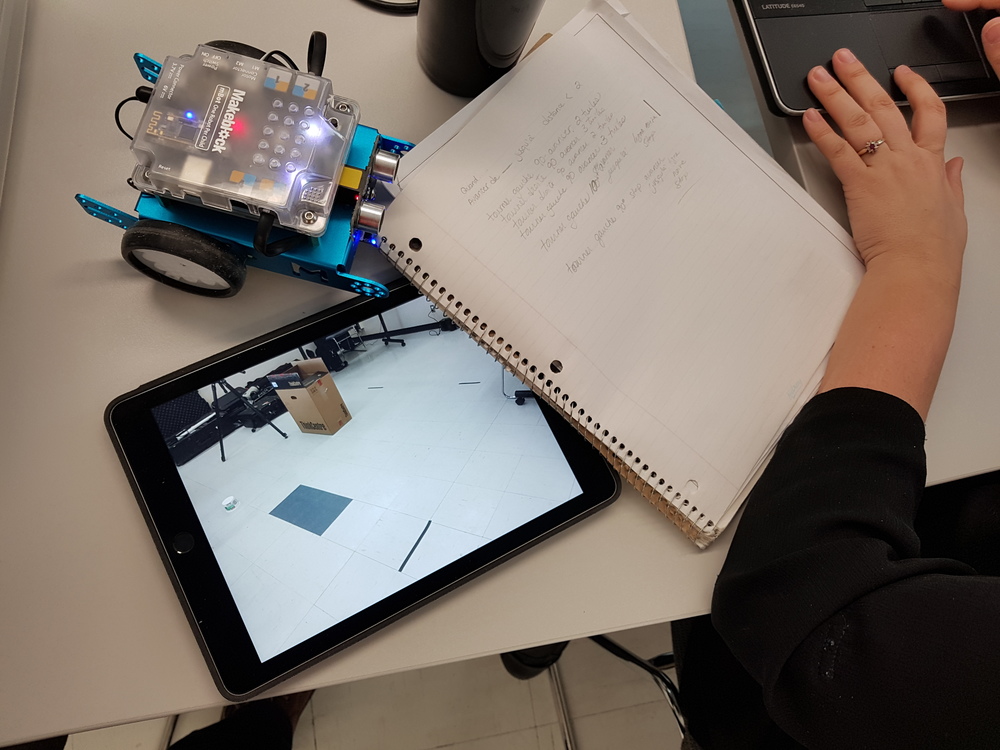
Précision lors des déplacements du robot : Ranger, avec la rotation par degré, précis en distance. Pour la ligne droite, besoin d’ajuster la forme du robot, le frottement des pièces (pour la compétition on peut mettre un peu d’huile), la surface de travail, etc.
Chromebook et mBot : Il existe deux solutions que je n’ai pas essayées. Les deux options sont payantes. La première, utiliser l’app Arduino Create (https://create.arduino.cc/ ) elle est payante 0,99$/mois. La seconde utilisée, codebender edu ( https://edu.codebender.cc/ ).
Matériel défectueux : des pièces de rechange peuvent se trouver sur Robotshop après s’être assuré qu’il y a bris (isoler le problème).
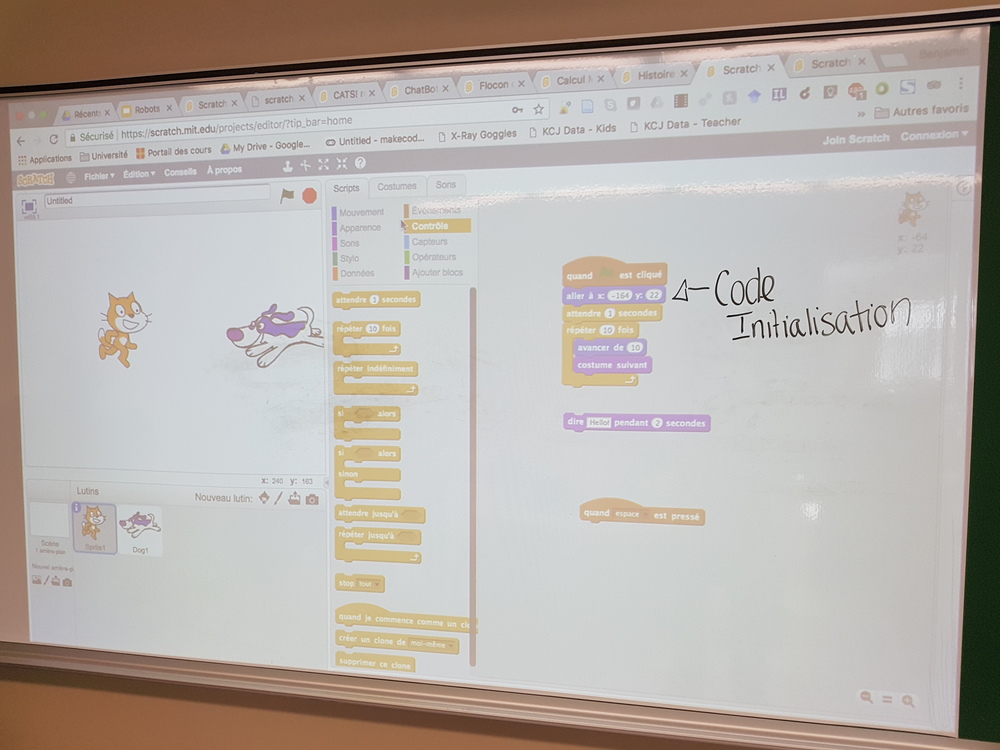
Documentation mBot : voir dans les document de cette page: Premiers pas avec son robot.
- Autre document : http://apcpedagogie.com/mbot-composants-robot-mbot/
MBlock v5, Conclusion à propos du MBlock 5
| Comment installer Mblock 5
Très important ! Pour utiliser la version Mblock 5, votre ordinateur Windows 10 doit être doté d’une carte Bluetooth 4.0 au minimum.
À savoir sur Mblock 5
NB : Vous pourriez avoir besoin d’installer un driver pour faciliter la connexion Bluetooth (post du forum Makeblock et lien vers le driver). Toutefois, si votre carte bluetooth est antérieur à 4.0, nous suggérons d’utiliser l’ancienne version MBlock 3.4 pour programmer en mode Bluetooth puisqu’il est possible que l’installation du driver n’est pas compatible avec les Bluetooth précédents. |
À propos de la robotique
Scratch 3 et EV3 : voir les notes de Raoul kamga (RÉCIT MST) sur ses expérimentations avec Scratch 3 et EV3.
Pédagogique
Initier les élèves à la programmation avec les jeux Blockly et code.org est une bonne stratégie.
Le cahier de robotique est un outil puissant tant pour l’élève que pour l‘enseignant (évaluation). Il peut être simple (cahier Canada) ou plus complexe (document créé par l’enseignant pour aider à l’organisation du travail de l’élève et de l’équipe).
Des défis : 32! Le document produit par une équipe du projet.
Activités en mathématique avec un robot : Rallye géométrique et Projet Mathématique sec I.
Ozobot et mathématique :
1)Géométrie:https://ozoblockly.com/editor?lang=en&robot=evo&mode=5#ecmsbh
2)Probabilités: https://ozoblockly.com/editor?lang=en&robot=evo&mode=5#yg8vze
Construction d’une barrière robotisée en science et technologie : pistes.
Activité en science et technologie : Planification Système solaire, Cahier de l’élève Système solaire
Défi musical avec mBot : Reproduire la marche impériale de Star Wars : https://youtu.be/08LvGifGRxU
-
- Cette vidéo est meilleure car le rythme de la musique est ralenti : https://youtu.be/V8J17SWuNeM
- L’idée est ensuite de placer les élèves en démarche de recherche afin de faire jouer une chanson de leur choix à l’aide du mBot.
Conclusions :
-
- Un robot ça ne fait pas tout, on doit bien identifier les besoins, les intentions, avant de choisir son robot.
-
- Pour les mathématiques, Ozobot et Sphéro semblent plus précis pour réaliser des défis géométriques.
-
- Au secondaire premier cycle, EV3 offre de belles possibilités pour les sciences et la technologie avec ses nombreuses pièces (engrenages, poulies, etc.) qui permettent de créer diverses structures (grues, bras, etc.).
- mBot, certains l’apprécient un peu moins maintenant de par ses problèmes de connexion si utilisé avec un portable. Les tablettes fonctionnent mieux de ce côté même si l’application de base n’offre pas toutes les possibilités de programmation. Ce robot (avec Ranger) reste un robot intéressant de par sa conception différente des autres sur le marché, ce qui permet de répondre à des besoins/intentions variés.
Merci à tous les participants pour leur travail dans ce projet!